3Dカメラとは | 3次元ビジョンの原理を解説
一口に「3Dカメラ」と言っても、その撮影方式はいくつかに分類できます。
当ページでは、ステレオ方式、ToF方式、構造化照明の3つの撮影方式をご紹介します。
ステレオ方式
複数台カメラを使用する
ToF方式
カメラと光源を組み合わせる
構造化照明
カメラとプロジェクターを組み合わせる
ステレオカメラ方式は安定性が売りであり、「リアルタイムで安定した距離測定が可能である」という点が強みです。
ステレオカメラ方式で代表的な製品をまず最初にご紹介いたします。
\実績多数の定番モデル/
ステレオカメラのライン組み込みならこちら!
安定したステレオカメラ方式をラインで活用するには2通りあります。1つは既存ラインへの組み込みで、いかに手軽に取り扱えるかが重要です。その際には、「高速3Dスキャナー LOM High Speed 3D Sensor Series」がおすすめです。もう1つは新規でラインを設計する際に、よく組み合わされるピッキングと抱き合わせになった「3D ロボットビジョン RC_VISARD」の採用です。こちらはソフトウェアもついているのでマシンビジョンを手軽に導入することができます。

さらに、それぞれの撮影方式のカメラのメリットやデメリット・欠点も併せて解説します。
そもそも3Dカメラって?
3Dカメラとは、縦横の情報だけでなく奥行き(深度)も撮影できるカメラを指します。
この「奥行(深度)情報の有無」が2Dカメラとの大きな違いです。
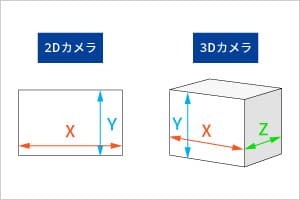
2Dカメラの場合、横と縦(X, Y)の2次元情報を撮影します。
3Dカメラは「2次元(X, Y)情報だけでなく奥行(Z)の情報を取得できるカメラ」です。
またロボットの目として機能するカメラがロボットビジョンと呼ばれるように、3Dカメラは3次元ビジョンとも表現されます。
ポイントは「奥行情報をどう取得するか」
これから、3つの撮影方式の原理を解説します。
3Dカメラの撮影方式
- ステレオ方式
- ToF方式
- 構造化照明
では、これらの方式で一体何の情報(データ)を取得しているのでしょうか?
それは「奥行」です。
3Dカメラは2Dカメラと違って、奥行き情報を撮影できます。
つまり、これら3つはそれぞれ違った方法で「奥行の情報」を取得している、と言えます。
ここが理解のポイントです。
「奥行きをどのように撮影しているか」が、3つの撮影方式で異なっています。

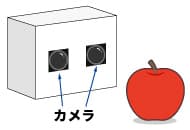
ステレオ方式(ステレオカメラ)の撮影原理
Q. 「ステレオ方式」では、奥行をどのように撮影しているか?
A. 複数台のカメラを用いることで奥行を割り出す。(三角測量)
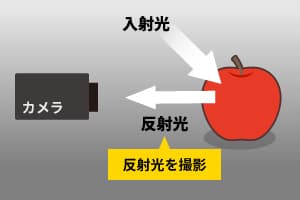
平たく言うと、人間の目と同じです。
人間の目は物体から反射した光を網膜で受け止めます。
カメラには網膜の代わりにセンサーがあるため、これが光を受け止めることでイメージを生成します。
私たちは2つの目で見ているため、立体的に物を見ることができます。
カメラも同じです。
2台のカメラを用いることで、奥行情報を算出できます。
3つの情報から算出
こちらはステレオカメラと撮影対象物(リンゴ)を上から見た図です。(解説のため誇張して表現しています。)
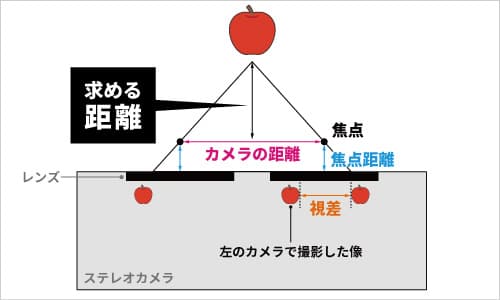
では、奥行情報、つまり「対象物までの距離をどうやって求めるか」ですが、これは3つの情報から算出できます。
ここでは、物体までの距離から、ステレオカメラの焦点距離を引いた値を求めます。(図中の「求める距離」)
「求める距離」は次の3つから割り出せます。
- カメラの距離
- 焦点距離
- 視差
カメラの距離は「2つのカメラの焦点を結んだ間の距離」です。
視差は「左右のカメラで撮影したイメージのずれ」とお考えください。
この3つの値はあらかじめ決まっていたり、簡単に導き出したりできるため、カメラの距離、焦点距離、視差から距離が求められます。
詳細解説
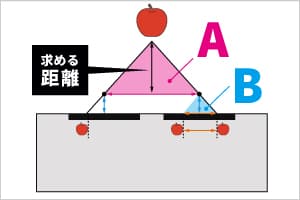
図の通り、2つの三角形ができます。
- 三角形A:カメラの距離を底辺、物体までの距離(=求めたい値)を高さとした三角形
- 三角形B:視差を底辺、焦点距離を高さとした三角形
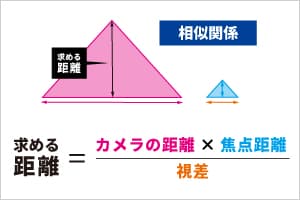
AとBは相似の関係になります。(高さ:底辺の比)
物体までの距離:カメラの距離=焦点距離:視差
そのため、こちらの式で物体までの距離を算出できます。
(カメラの距離×焦点距離)÷視差
ステレオカメラのメリット・デメリット
ステレオカメラのメリットは安定性です。
「リアルタイムで安定した距離測定が可能である」という点が強みでしょう。
ステレオカメラは人間の認識に近い空間把握能力を有しており、撮影距離・奥行制度ともに安定して測定できます。
さらに屋外での撮影も可能なため、自動運転をアシストする車載カメラとしても用いられています。
他方、ステレオカメラには、校正の課題があります。この辺がデメリットとも言えるでしょう。
ステレオカメラの撮影前には、カメラそれ自体の校正が必須です。
ステレオカメラの校正は既知のパターンを、カメラ位置を変えて何度か撮影することで行います。
またカメラ間の距離から割り出すため、経時劣化によって基盤位置などにずれが生じた場合は校正が必要です。
また3D画像の生成時には歪み補正・平行化処理や画像の正規化などの処理を行う必要があります。
この処理がPC側で行われる場合、PCへの負担が大きくなるという欠点もあります。

3Dロボットビジョン RC_VISARD
ロボットビジョン向け。
プログラミングなしで対象物の検出、ロボットの把持ポイントまで算出してくれる非常にユーザービリティに優れたステレオ方式の3Dカメラです。
深度イメージをカメラに内蔵したグラフィックカードが処理するため、外部に処理ボードを必要としません。

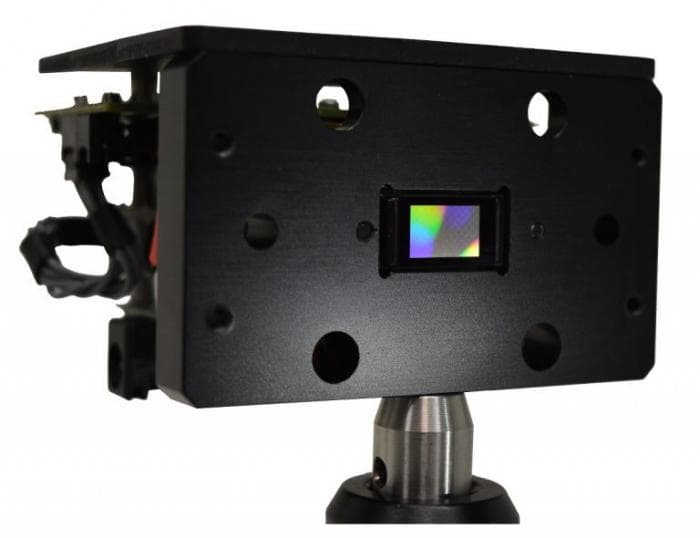
リアルタイム ステレオ 3Dカメラ
リアルタイムでの撮影が可能なステレオカメラです。
サイズ12×6×2cm、重量195g。必要な要素がコンパクトな筐体に収まっています。
3D画像の生成までをカメラ側で処理するため、PCに負荷が掛からないというメリットもあります。
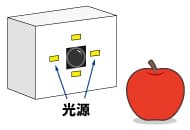
ToF方式(ToFカメラ)の撮影原理
ToFとは「Time of Flight」の頭文字を取った言葉です。
タイムオブフライト、日本語では「飛行時間」。何の飛行時間でしょうか?
「光」の飛行時間です。
つまり、ToF方式では「光の時間」から奥行を求めています。
Q. 「ToF方式」では、奥行をどのように撮影しているか?
A. 光源から照射された光がカメラに戻ってくるまでの時間から割り出す。
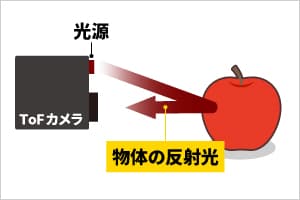
カメラは物体に反射した光を撮影しています。
ToFカメラの場合、反射させる光を光源から照射しています。
カメラと光源がセットになっているため、この光源から光を出します。
光は物体に反射して、カメラに戻ってきます。
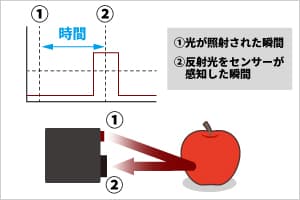
光の速さは決まっています。そのため「光が照射されてから、戻ってくるまでの時間」を測定すれば、公式(距離=光速×時間)を用いて、対象物までの距離を割り出せます。
さらに、ToF方式は「照射される光の違い」によって、2つに分類できます。
ToF方式で用いられる光
- パルス光
- 連続光
パルス光
パルス光は平たく言うと「短く点滅する光」です。
パルス光って?
パルス(pulse)は光に限らず「短時間に変化する信号」を指します。光の場合は「ごく短い時間に照射される光」です。チカチカと点滅する光を想像してください。光のON/OFFを繰り返せば、光の点滅を作り出せますが、パルス光はこのON/OFFの間隔が非常に短い光とお考えください。
光源がごく短い時間に発光することで、パルス光を物体に照射できます。
パルス光が物体に当たって戻ってくる時間(=Time of flight)を測定。
これによって奥行情報を求められます。
連続光
連続光というと難しく聞こえますが、要は光続けている状態の光です。
パルス光は「短時間の光」でしたが、連続した光を撮影対象に照射します。
すると物体に反射した光がカメラに戻ってきます。
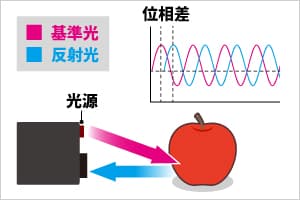
ポイントは「照射した光(基準光)」と「物体から反射してカメラに戻ってきた光(反射光)」は「位相が異なる」という点です。
図では基準光と反射光を色分けしています。
このように連続光は波長の位相差を見ます。
2つの光の違い(位相差)を測定し、時間を算出します。
ToFカメラのメリット・デメリット
まず他の方式にはない「撮影距離の広さ」がメリットとして挙げられます。
他にもフレームレートが高く、暗所での撮影が可能なことや、非常に低コストであることから、様々な観点から非常に使いやすいカメラと言えます。
特に、物流分野のピッキングロボットに用いられていることは有名です。
ToFカメラによって、大きさや形状を測定できることから、箱詰め作業や体積の測定で用いられています。
大きなデメリットは「屋外での撮影に対応できない」という点です。
屋外には太陽光があります。
イメージセンサーが太陽光に反応するため、光源から出た光の反射を見ることができなくなります。
測定形式上、活躍の場が「屋内」に限定され、車載カメラとして用いることができないなど用途に制約がある点がデメリットと言えるでしょう。
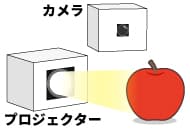
構造化照明(プロジェクター方式)の撮影原理
文字通り、特殊な光を発する照明を用いて奥行を撮影します。
これまでのステレオ方式とToF方式は、それぞれカメラに入ってくる光の情報から距離を算出する方法でした。
しかし「構造化照明方式」の場合は、光を照射してそのリアクションを見るイメージでお考えください。
Q. 「構造化照明」では、奥行をどのように撮影しているか?
A. 照明(プロジェクター)の光を物体に照射して光の状態から奥行・凹凸を把握する。
ToF方式ではカメラに光源がついていましたが、構造化照明方式では、照明(プロジェクター)とカメラが分かれています。
照明から撮影対象へ様々なパターン光を照射します。
カメラは照明と異なった角度に配置します。
カメラが当たった光の歪みを観察することで、対象物の奥行を測定します。
実際に撮影の様子と、撮影データを見てみましょう。
撮影の様子

顔(撮影対象)の正面に構造化照明、隣にカメラが配置されている。
撮影データ
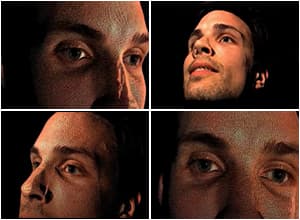
データをぐるぐると回転させ、様々な角度から撮影した人の顔を見ることができる。
構造化照明によって、あるパターンを持った照明が照射されます。
画像では縦縞模様の光が人の顔に向けて照射されています。
仮に何もない壁に向けて構造化照明を当てた場合、壁には凹凸がないため、縞模様はまっすぐでパターンに変化はでません。
しかし人の顔に向けて照射した場合は、顔の凹凸に沿ってパターン光が歪みます。
カメラは光の歪みを見ることで、立体を判断します。
こちらは「構造化照明」の中でも「プロジェクター方式」に分類される方法です。
構造化照明を用いた3Dイメージングの中には「レーザードット方式」もあります。
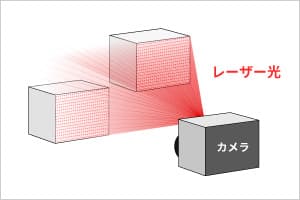
構造化照明(レーザードット方式)の撮影原理
レーザーをスキャンもしくはエキスパンダーで面照射し、カメラで各ドットを観察する方式もあります。
この時、照射する光は非常に細い光=レーザー光です。このレーザー光をドットのように細かく対象に照射するため「レーザードット方式」と呼ばれています。
構造化照明のメリット・デメリット
構造化照明のデメリットは撮影のためにカメラの他に別途プロジェクターが要る点です。
ステレオカメラやToFカメラのようなコンパクト性には欠けています。
また屋外での撮影にも適していません。
この2つが大きな欠点として挙げられますが、他の2方式にはないメリットもあります。
それは「高精度」での撮影が可能な点。
例えばToFカメラは最適に設定しても、必ず1cmのずれが生じます。ステレオカメラもToFカメラほどではありませんが、最小で0.1cmはずれます。
他方、構造化照明の場合、このずれ幅が0.1〜1mmと非常に狭いため、高精度での撮影が要求されるアプリケーションに向いています。

撮影方式の特徴
それぞれの特徴をまとめた表がこちらです。
3つの撮影方式ごとに得意・不得意があります。
| ステレオカメラ | ToFカメラ | 構造化照明+カメラ | |
|---|---|---|---|
| 撮影距離 | ○ | ◎ | △ |
| 奥行精度 | ○(0.1〜10cm) | ○(1〜10cm) | ◎(0.1〜1mm) |
| PCへの負荷 | △ | ○ | △ |
| リアルタイム性 | ○ | ○ | △ |
| 暗所での撮影 | × | ○ | ◎ |
| 屋外での撮影 | ○ | △ | × |
| コンパクト性 | ◎ | ◎ | × |
| コスト | ○ | ◎ | ○ |
用途に応じて、使用するカメラに求められるスペックを洗い出すことで、最適なカメラを選ぶことができます。
選定に迷われた際は弊社(ケイエルブイ株式会社)にお気軽にご相談ください。
お客様の用途・目的を考慮し3Dイメージングのプロである担当者が最適なカメラをご提案いたします。
このカテゴリのコンテンツ

関連コンテンツ


用語集
マシンビジョンコース
カメラ基礎知識
特殊カメラ基礎知識
画像処理プログラミング
USBカメラ設定パラメータ
カメラの選び方
マシンビジョンアプリケーション
- ばら積みピッキングとロボットビジョン
小型カメラ
スペクトルカメラ