ピッキングに最適
価格・工数を抑えて導入できます
Roboceptionの3Dカメラシステムは、カメラで取り込んだデータから、オンボードで対象の「位置・姿勢・サイズ」を検出。外部ハードウェア、プログラミングは不要。
また導入プロセスもシンプルです。
- カメラ側で「画像解析まで自動」で実行
- 導入に「複雑な専門知識」は不要
このため、価格・工数を抑えてスムーズに導入できます。
03-3258-1238
お問い合わせ


Roboceptionの3Dカメラシステムは、カメラで取り込んだデータから、オンボードで対象の「位置・姿勢・サイズ」を検出。外部ハードウェア、プログラミングは不要。
また導入プロセスもシンプルです。
このため、価格・工数を抑えてスムーズに導入できます。
 ピッキングロボットへの取付け
ピッキングロボットへの取付け
 ロボットと連携して使用
ロボットと連携して使用
ピッキングに必要な「画像解析ソフトウェア」が
あらかじめ組み込まれています
当製品の強みは、精度の高い「画像解析」です。
ロボットと連携し、ピッキングを実行するためには、ハードウェアとしての「3Dカメラ」と「画像解析ソフトウェア」が欠かせません。
 3Dカメラ
3Dカメラ
 画像解析ソフトウェア
画像解析ソフトウェア
当製品に備わっているソフトウェアは、ばら積み状態で個々の対象の「位置・姿勢・サイズ」を認識できるだけでなく、ロボットが掴むポイント(把持点)も算出できます。
そのため、プログラミング不要で、即導入が可能です。
画像解析が可能な「3Dカメラ」と「ロボット」を連携することで、リアルタイムでデータを取得できます。
ピッキングもスムーズです。
 リンゴの把持点(最もフラットなポイント)を検出
リンゴの把持点(最もフラットなポイント)を検出
 ばら積み部品の個々の把持点を取得
ばら積み部品の個々の把持点を取得
当製品は、リアルタイムでオブジェクト解析を行います。
このため、自動で「個々の対象を認識」するだけでなく、「把持点の検出」まで可能です。
その上で、さらに、他の対象物や箱との「衝突」も予測。ロボットハンドが「問題なく取りに行ける座標」だけを返します。
導入に必要な全てが揃っています
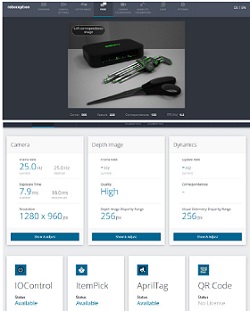
高フレームレートで低ノイズ
1.2メガピクセル, 0.8Hzの「高フレームレート」。
加えて、スムージング技術によって「低ノイズ」でデータを得られます。
用途に合わせた4種類のモデルをご用意。

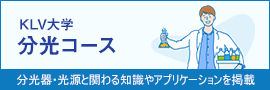
プロジェクターにより
平面形状でも高精度に認識
Roboceptionでは純正のプロジェクター光源を用意しております。本来ステレオカメラは表面が均一で一定の色の対象物を苦手としますが、プロジェクター光源を組み合わせることで、フラットで質感に特徴のない対象物を精度高く検出することが可能になります。
使いやすいソフトウェアで
導入・運用もスムーズに
導入時に、製品や箱のサイズ、大きさを入力。
ソフトウェアが自動で、カメラ内部で取り込んだデータをリアルタイムに解析、処理して、把持点を算出します。
ソフトウェアは特別な知識がなくても扱えます。
UIもわかりやすいため、入力もスムーズです。
また当製品は、あらかじめ用途に適した「アプリケーションモジュール」が用意されています。
このため「アプリケーションモジュール(四角形のワークを検出する「ボックス・ピック」など)を選択することで、プログラミング・画像解析なしでプロセスに統合できます。
アプリケーションモジュール
| ボックス・ピック | 段ボールや梱包箱など、四角形の対象の位置・姿勢・サイズを検出。 |
|---|---|
| アイテム・ピック | 吸引式グリッパーに最適。球体、多面体の最もフラットなポイントを算出。 |
| CADマッチ | CADデータを元に対象の位置を検出。信頼性の高い把持ポイントも算出。 |
| シルエット・マッチ | 薄い(高さのない)対象物を検出。均一な質感でも検出可能。 |
| 型式 | rc_visard 65 | rc_visard 160 |
|---|---|---|
| 解像度 | 1280 × 960 pixel,1.2 Mpixel | |
| タイプ | カラー/ モノクロ | |
| ベースライン | 65 mm | 160 mm |
| レンズ焦点距離 | 4 mm | 4mm、 6 mm ( オプション) |
| FOV | horizontal 61°, vertical 48° | horizontal 61°, vertical 48° [ 6 mm lens variant: h 43°/ v 33°] |
| 深さレンジ | 0.2 – 1 m | 0.5 - 3 m |
| 深さ解像度 | 0.04 mm @0.2m 0.9 mm @1.0m |
0.1 mm @0.5m 3.3 mm @3.0m [6 mm lens variant:0.06-2.2 mm] |
| 解像度& FPS | 1280 × 960 (F) @ 0,8 Hz 640 × 480 (H) @ 3 Hz 320 × 240 (M) @ 15 Hz 214 × 160 (L) @ 25 Hz |
|
| Ego-Motion | 200 Hz, low latency | |
| コンピューティングユニット | Nvidia Tegra K1 | |
| インターフェース | WebGUI, Rest-API, GenICam, GigEVision2.0, UDP based ego-motion interface |
|
| コネクター | 8-pin A-coded M12 socket for GigE 8-pin A-coded M12 plug for GPIO, power |
|
| 寸法 | 135 × 75 × 96 mm | 230 × 75 × 84 mm |
| 重量 | 680 g | 850 g |
| 電源 | 18~30 V | |
| 温度範囲 | 0~50 ℃ , passive cooling | |
| IP | IP 54 | |
| 照明モード | ストロボ | |
|---|---|---|
| 波長 | 白色 | |
| 電源 | 24V,min.65W | |
| コネクター | M12,8 contacts | |
| 重量 | 660 g | |
| 寸法 | 70 mm(diameter) 152 mm(incl.lens) |
|
| 使用温度範囲 | 0~45℃ (passive cooling) | |
| IP | IP 54 | |
| Y-Cable (製品に含む) |
M12, 8pin,A-coded,30 cm sensor-projector cable | |
| Lens (製品に含む) |
12.5 mm c-mount lens | |
| 照射角度 | 62° horizontal,48° vertical | |
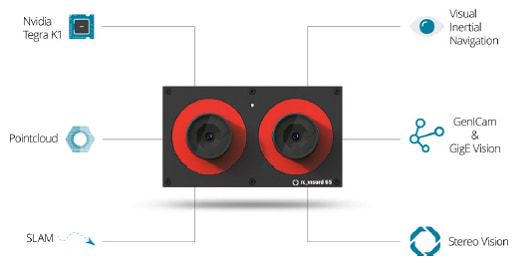
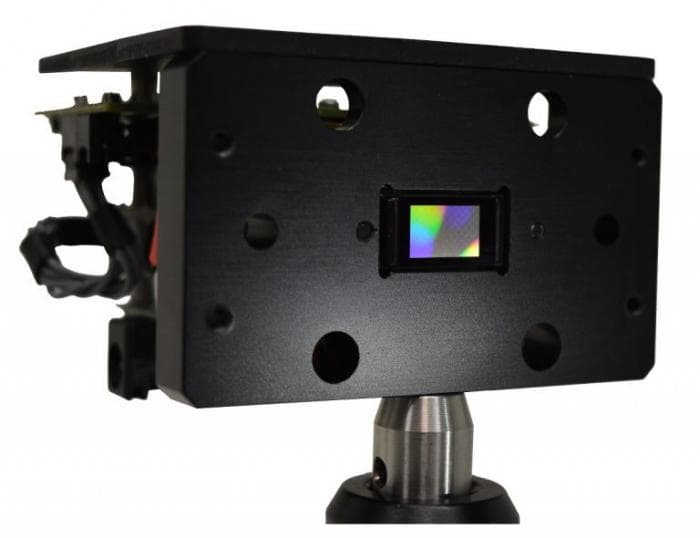
内蔵されたグラフィックカードにより取り込んだ画像はでオンボード処理されます。外部での処理ボードを必要としません。取得した深度イメージからカメラ内部でポイントクラウドデータを生成可能です。

Roboceptionのアプリケーションモジュールを使用することで、複雑な画像解析、プログラミング等を行わずインラインプロセスへの導入が可能です。
RC_REASON BoxPick Moduleは、取り込んだ画像データをカメラでオンボード処理し四角形のアイテムの検出および位置、向き、サイズの検出が可能となります。
また、ピッキング用途における最も効率的なロボットの把持ポイントを算出します。
RC_REASON ItemPick Moduleは吸引式のグリッパーを使用するピック&プレイスに最適なアプリケーションモジュールです。
吸引グリッパーを使用した際の表面
把持ポイントを算出します。
事前にCAD データを取り込むことで、取り込んだ画像内のアイテムとCAD データを比較します。RC_REASON CAD Match Moduleのデータ処理は専用PC であるRC_CUBEを介して実行されます。より効率的で信頼性の高い指示をロボットに与えることが可能です。
事前に対象物の概要寸法を教え込むことでフラットな対象物の位置および向きの検出が可能です。
本来ステレオカメラは均一な質感の対象物を苦手としますが、純正のRandomDot Projectorを使用することにより、精度高く検出することが可能です。
QRタグおよび球体サンプルを認識し、ピッキングを行いました。

高精度3Dカメラシステム Roboception
ダウンロード