3Dロボットビジョン(3Dカメラ)は、複数のカメラを使用して、X軸(横)、Y軸(縦)、そしてZ軸(奥行き)の三次元空間を把握できるカメラです。
この3次元の座標データにより、人間が物体を見るときには当たり前の、"奥行きの感覚"をロボットアームに伝えることができ、3次元空間の中で物を「掴む」ことが可能になります。
03-3258-1238
お問い合わせ2023.06.29 | ばら積みピッキング, 事例・動画有り
ばら積みピッキングとは、バラバラに積まれたワーク(ピッキング対象物)をロボットアームでピッキングすることを指します。
従来は人の手で行う必要がありましたが、近年3Dロボットビジョンの技術向上により、ロボットに自動で行わせることができるようになりました。
日本国内では人手不足が深刻な問題となっておりピッキングの導入に前向きな企業は増加しています。しかしシステム導入に掛かるコストが高いイメージにより二の足を踏んでいるユーザ企業様も多いかと思います。
また、ロボットメーカー様が3Dロボットビジョンの自社開発を検討するにも画像解析の高度な研究開発やプログラミングが必要で、コストと納期の観点からハードルが高いと考えられています。
そこで弊社が扱う、比較的安価で、かつ導入が容易なroboception社の3Dロボットビジョン RC_VISARDをご紹介いたします。
また、現在の技術でばら積みピッキングにどこまで対応できるのか、導入に掛かる工数や手間はどの程度かなど、ばら積みピッキングとロボットビジョンの関係について最新情報をお話できればと思います。
商品をピッキングする作業において、物を「見る」能力が必要不可欠で、それを担うのがロボットビジョン(カメラ)です。
そして特に、ばら積みピッキング(バラバラに積まれた対象を掴み上げる作業)の場合には、立体的な位置情報が必要になるため、3Dロボットビジョン(3Dカメラ)が必要になります。

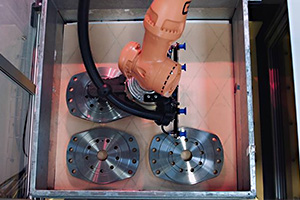
3Dロボットビジョン RC_VISARD
3Dロボットビジョン(3Dカメラ)は、複数のカメラを使用して、X軸(横)、Y軸(縦)、そしてZ軸(奥行き)の三次元空間を把握できるカメラです。
この3次元の座標データにより、人間が物体を見るときには当たり前の、"奥行きの感覚"をロボットアームに伝えることができ、3次元空間の中で物を「掴む」ことが可能になります。
ばら積み状態のワークをピッキングしラインに載せるには、ランダムな状態のワークを検出し、選んで掴み、障害物を回避し落とさないように注意しながら所定の位置に移動させるという複合的な作業が必要です。
人間が張り付きでこの作業を行うと、人件費としてのコスト・欠勤時の対応・人材の補充など、頭を悩ませる課題が多く生じます。
このような複雑な作業をロボットに行わせることができると、上記の問題点を改善することができます。
ワークが治具等によって一定のルールで整列されている状態でのピッキングと異なり、ばら積みピッキングでは状況に応じた判断が必要です。
バラバラに積まれたワークのピッキングには、3次元による空間把握と画像解析による状況把握が必要であり、ソフトウェア開発としての難易度が高く研究開発を要します。
例えば「ピッキング対象のワークの向きによって、アームの挿入角度を変える」「箱の壁や障害物となる他のモノとの重なりをケアする」など、ハードウェアとソフトウェア共に高い技術が必要になります。
上述のとおり難易度の高いばら積みピッキングですが、コストを抑えて早期に実現する方法としてピッキング特化型の3DロボットビジョンシステムRC_VISARDをご提案しています。
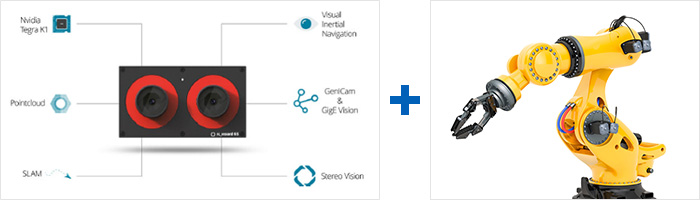
ばら積みピッキング対応のロボットビジョンシステムと任意のロボットを組み合わせる
全てを自社開発するよりも大幅なコストダウンと期間の短縮が見込めます。
弊社がお勧めするロボットビジョンシステム RC_VISARDは、ばら積みピッキングに対応した3Dロボットビジョンシステムです。
ロボット部分はメーカーや種類を問いません。当システム側で画像解析し把持点を取得し、衝突回避までケアします。3Dカメラで取得した画像を元に内蔵されたグラフィックカードで処理するため、外部での処理ボードを必要とせずシンプルに構成できます。
特別な学習や複雑な操作なく直感的に使えるソフトウェアで簡単にプロセスに統合可能です。
複雑な形状でも自動で検出します。
段ボールや梱包箱など四角形の対象の位置・姿勢・サイズを検出。
吸引式グリッパーに最適。ワークの最もフラットなポイントを算出。

CADデータを元に対象の位置を検出。信頼性の高い把持ポイントも算出。

薄い(高さのない)対象物を検出。均一な質感でも検出可能。

RC_VISARDによるピッキング事例をご紹介いたします。
膨大な商品の種類を持つ流通業において、ばら積みピッキングを実現しています。

このケースでは、製品の形状やパッケージの種類が多岐にわたるため、それに対応したビジョンソリューションが必要でした。
RC_VISARDの導入により、開発プロセスが大幅に簡素化されました。
ピッキング対象となるワークは油が付いていたり、平坦な面に置かれていないこともあります。
そのため2Dでのソリューションや、認識精度の低い他のシステムでは対応できませんでした。
RC_VISARDがワークの位置と向きを検出し、把持点をロボットに提供し、3Dでのピッキングに成功しています。
日本には優れたロボット技術があり、ばら積みピッキングの実現には、ばら積みピッキングに特化した3Dロボットビジョンシステムをインテグレートすることが有効です。
RC_VISARDは既に多くの実績のある3Dロボットビジョンソリューションであり、エンドユーザ様、SIer様、ロボットメーカー様いずれにもコストと期間のメリットをご提供可能です。

機械学習/ディープラーニングを活用したスペクトル解析

「プラスチックの選別」に革新!
近赤外分光がプラスチックのリサイクルに貢献
ハイパースペクトルカメラ導入の費用対効果は?
【第1回】光学機器商社がレタスで実験してみた!
種まき編