【自動運転で再注目】レーザー技術「LiDAR」とは?
2020.04.13 | LD電源
道路交通法が改正され、2020年4月から施行されます。
ながら運転の厳罰化の他「自動運転レベル3」が法制化され、いよいよ日本でも自動運転が本格的に進展する見通しです。
自動運転はドライバーを補助する技術として交通事故の抑制にも繋がると考えられています。
政府は法改正によって先端技術の普及や研究開発を強力に推進し、今年度中に24時間死者数を2,500人以下となる「世界一安全な道路交通」の実現を目指します。
環境が整ったことで、研究開発の進展が期待されていますが、その中でも近年自動運転車の「目」として機能する技術、LiDAR(ライダー)に再び注目が集まっており、研究開発が活発化しています。
今回は自動運転の鍵となる技術「LiDAR」について、わかりやすくお伝えしていきます。
自動運転車とは?
LiDARは自動運転車の実用と関わる技術の一部です。
まずは全体像を捉えるために「自動運転車」がどのようなものか見ていきましょう。
自動運転車は人間に変わり自動運転システムがドライバーの運転操作を代替します。
英語では「self-driving car」と表現される通り、完全な自動運転(自動運転レベル5)はドライバーの操作を必要とせず、無人運転が可能になります。
また上述の文章の中に「自動運転レベル5」と言う記述がありましたが、自動運転には「レベル」があります。
レベル0の「自動運転なし」からレベル5の「完全運転自動化」まで自動運転の程度によって定義付けが行われています。
今回の法改正で「自動運転レベル3」すなわち、条件付きの運転自動化が可能になりました。
道路交通法の改正によって「運転」の定義が変わりました。
これまでの法律では自動運転について規定されていませんでしたが、2020年4月より自動運転システムによる運転も「運転」として定義づけられ「自動運転レベル3」が可能になりました。
「自動運転レベル3」では、限定されたエリア内において、自動運転システムが運転を制御します。
緊急時にはドライバーによる操作が求められますが、ドライバーによる運転操作が軽減されることから、レベル3の自動運転車の普及によって交通事故や渋滞の抑制に繋がると考えられます。
自動運転システムとLiDAR
自動運転車には「自動運転システム」が組み込まれており、これが自動車を制御することで人間の運転操作を代替しますが、システムは具体的に何を行なっているのでしょうか?
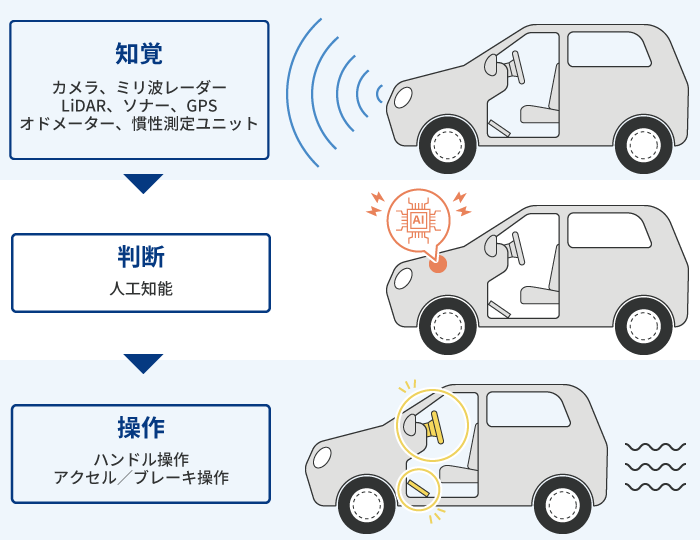
私たちは周囲の状況を確認し、それを元にハンドルやアクセル、ブレーキ操作を行います。 この一連の動作をより丁寧に見ていくと「環境の知覚」と「脳による判断」、そして「操作」に分けられます。
自動運転の実現には、知覚→判断→操作のプロセスを特定の機能を有したセンサーや、制御プログラムに代替させる必要があります。
ここでいよいよ「LiDAR(ライダー)」の登場です。
ドライバーが運転する場合、白線や前方の車両、障害物といった周辺環境を認識しなければなりませんが、これは自動運転車も同様です。
自動運転車が周辺環境を認識するために様々なセンサーや技術が関わっています。
例えば、カメラは画像情報を取得できます。カメラは自動運転車の「目」として機能します。
勿論カメラだけでは不足が生じます。
私たちの目は色や形といった光情報の他にも、距離を捉えています。
LiDARは「距離の測定」と関わる技術です。
LiDARとは
LiDARは「Laser Imaging Detection and Ranging」の頭文字を取った言葉で「レーザー画像検出と測定」という和訳の通り、レーザー光を用いたリモートセンシング技術を指します。
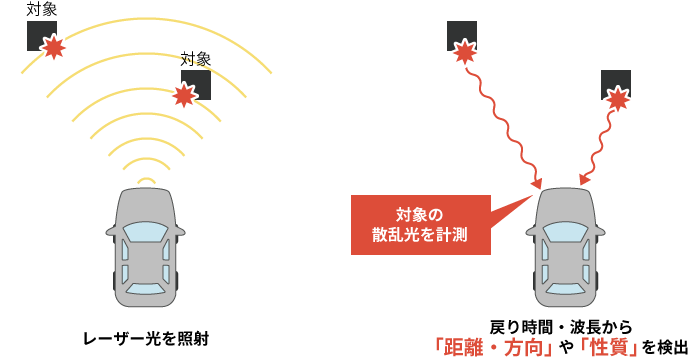
LiDARではレーザー光を照射し、戻り時間や波長から対象の距離や方向、性質を検出します。
ソリッドステート式による小型化・軽量化
これまでのLiDARは筒のような形状で、駆動用モーターを有している「機械的回転方式」が主流でした。
レーザー光が360度走査するため、高出力レーザーにも対応できましたが、大きさや重さが車載用に向いていなかったことから、開発企業は小型化や軽量化に取り組んできました。
またコストの抑制も大きな課題でした。
機械的回転方式の場合、広範囲にレーザー光を照射する必要があったため、可動部やモーターのような回転機構が必要で、それに応じ部品数も多くなることから、低コスト化が難しいという背景がありました。
大型・重量・高コスト。
これらを解消するために、そもそも可動部や回転機構を減らす(もしくは必要としない)メカレス化が現在の主流です。
それが「ソリッドステート式(Solid State)」のLiDARです。
ソリッドステート式は従来の機構部を半導体技術や光学技術によって置換し、メカレス化を目指します。
ソリッドステート式の中では「MEMSミラー方式」が有名で、こちらはすでに国内外の企業によって、ある程度開発が進められています。
自動運転システムとLiDAR
MEMSミラー方式は、ソリッドステート式の一種で電磁式のMEMSミラーを用います。
MEMSは「Micro Electro Mechanical Systems」すなわち「微小電気機械システム」を意味します。
ミリメートル、マイクロメートルサイズのMEMSは半導体のシリコン基板、ガラス基板、有機材料を始め、センサーやモーター、電子回路が一つにまとめられた構造になっており、主にスマートフォンのセンサー類で活用されています。
MEMS技術を応用した「MEMSミラー」は、中央にミリスケールのミラーを備えたシリコンデバイスで構成されています。
フレミング左手の法則によってローレンツ力を発生させミラーに動力を与えて動かします。
ミラー駆動によってレーザー光に振れ角を持たせることで、扇状スキャンが可能になります。
MEMSミラーを用いることでモーターが不要になり、可動部を最小限に抑えられるため、小型化・軽量化が実現します。
フラッシュ方式のLiDARも
MEMSミラー方式は所謂「走査型」の測定方式です。
走査型のLiDARには、前述の「機械的回転方式」や「MEMSミラー方式」に加え「フェーズドアレイ方式」がありますが、これらは一様に、照射したレーザー光によって周辺エリアをスキャンする方法が採用されています。
一方「フラッシュ方式」は走査型ではありません。
フラッシュLiDARカメラの焦点面には、3Dランドスケープモデルを作成するための十分な「深度」と「強度」を持つピクセルの行と列があります。
各ピクセルは、各レーザーパルスがターゲットに到達してセンサーに戻るまでの時間、およびレーザーパルスが接触しているオブジェクトの深さ、位置、反射強度を記録します。
色の代わりに距離の写真を撮るカメラのように、単一のパルスで視野を照らす単一の光源を使用します。
Wikipedia「Lidar」より引用(最終閲覧日:2020年4月9日)
こちらで「色の代わりに距離の写真を撮るカメラのよう」と表現される通り、走査によるスキャニングではなく、単一のレーザーパルスを使用して通常のカメラと同じように情報を取得します。

レーダーとはどう違う?
LiDARと同じく自動運転で「ミリ波レーダー」が注目を集めています。
LiDARは測定の際にパルス発光する「レーザー光」つまり光を用いています。
一方、ミリ波レーダーは「電波」を用います。
電波の中でも波長が1mm~10mm、周波数が30〜300GHzの場合、ミリ波と定義づけられます。
ミリ波レーダーは長距離観測、LiDARは短中距離の計測というように自動運転車では併用されます。
LiDARのレーザー光について
LiDARでは「光」を照射しますが、その光は紫外線や可視光、近赤外光といった波長域を持つ「パルス発光するレーザー光」です。
パルス発光とは、平たく言うと高速にON/OFFが繰り返される光です。
こちらをご覧ください。
左がパルス発光する光、右が連続発光の光です。
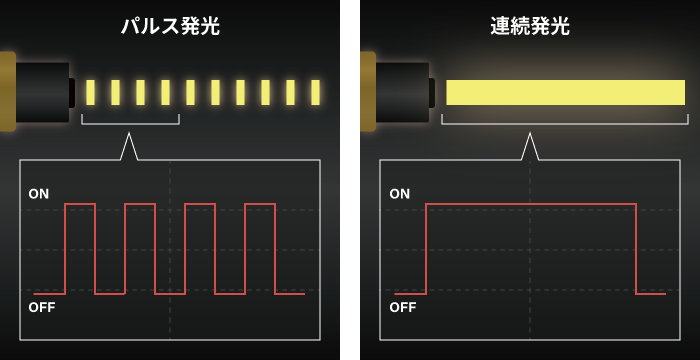
連続発光(右)の場合、ON/OFFの切り替えはなく、ずっと光が照射される状態です。
一方パルス発光(左)の場合は、光が断続的になります。(下のON/OFFの図は電源からの入力信号を表しており、ONの時は発光、OFFの時は発光しないという仕組みです。)
パルス発光の場合、このような断続的な光になります。
とはいえその断続性は人間が認識できるようなものではなく、ナノ秒〜マイクロ秒といった非常に短い時間にON/OFFを繰り返します。
パルスには周波数がある
LiDARはレーザーを照射しますが、この光は上述の通り、レーザーパルスです。
LiDARはレーザーの高速パルスを照射します。
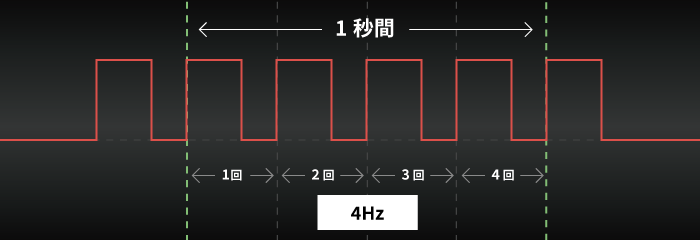
パルスは次の通り「周波数」で表現されます。
さらに周波数は「1秒間に何回繰り返されるか」という「回数」を表します。
周波数は「1秒に繰り返される回数」を指し、単位は、ヘルツ(Hz:hertz)で記載されます。
これは、言い換えるならば「1秒間に、何回、周期が繰り返されるか」を意味します。
「LD用パルスジェネレータ搭載電源の選び方」より引用
例えば、4Hzの場合「1秒間に4回パルスが繰り返される」と理解できます。
パルスの周波数と情報量
LiDARはパルスが戻ってくる時間などを測定することで、対象物までの距離を明らかにします。
例えば「フラッシュ方式」は高速・繰り返し動作が可能なため、周波数が高いという特徴があります。
これは照射される光の、周波数が高い=1秒間のパルスの繰り返し回数が多い、ということです。
つまり「1秒間に照射される光」が多いということは、単純に「物体に跳ね返って戻ってくる光」も多く、早くなります。
フラッシュ方式ではパルスの周波数が高いため、分解能・フレームレートの高いLiDARが実現し、リアルタイム測定が可能になるという記述もあります。
3D Flash LIDARセンサーアレイテクノロジーの大きな利点の1つは、レーザーパルスの繰り返し周波数で3Dイメージ映像を取得できるため、3Dイメージ映像が現実のものになることです。この機能により、リアルタイムのマシンビジョンが可能になります。フレームレートが高いということは、ポイントスキャンテクノロジーよりも迅速に地形マッピングを取得できることを意味し、エリアのスキャンとキャプチャに必要な飛行時間を短縮できます。
Advanced Scientific Concepts「TECHNOLOGY OVERVIEW」より引用(最終閲覧日:2020年4月13日)
パルス制御が可能な製品ご紹介
LiDARの実用化に向けて、現在メカレス化が進行しており今後は波長などレーザー光の制御が求められます。
LiDARの研究開発における「パルス制御」で重宝する製品がこちらです。
ディレイ/パルスジェネレータ

ナノ秒単位の高周波数パルス、ディレイ、バーストを生成可能!LDの自在なタイミングコントロールが実現。
ディレイ/パルスジェネレータ Tombak
こちらは半導体レーザー(LD)の精密コントロールが可能な「パルスジェネレータ」です。
パルスジェネレータはLDの電源として機能します。パルスジェネレータを用いることで、周波数を始め、パルス幅(レーザーのパルス発光時間)など高速レーザーパルスを精密コントロールが実現します。
ハイパワー・ナノ秒パルス発振モジュール

高輝度・ナノ秒パルスを発振。LD、多機能パルスジェネレータが搭載された、ターンキーレーザーダイオードドライバモジュール
ハイパワー・ナノ秒パルス発振モジュール CCSI-HP-HS
こちらの製品は、レーザーダイオード(LD)、多機能パルスジェネレータ、駆動電源など、短パルス発振に必要なデバイスが1つのモジュールになっており、マルチモードファイバーから高輝度、ナノ秒単位のパルス発振が可能です。パルス幅、ピークパワー、繰り返し周波数などのパラメータも調整できます。
905nm、940nm、1470nmなどの波長モデルが用意されており、LiDARの研究開発に最適です。
関連コンテンツ
このカテゴリのコンテンツ

レーザーコース
レーザー技術基礎
レーザーの種類
レーザーの波長毎の特徴
レーザー関連製品の選び方
レーザーアプリケーション
注目の記事

機械学習/ディープラーニングを活用したスペクトル解析

「プラスチックの選別」に革新!
近赤外分光がプラスチックのリサイクルに貢献
ハイパースペクトルカメラ導入の費用対効果は?
【第1回】光学機器商社がレタスで実験してみた!
種まき編