本記事では、ユニバーサルロボットと3Dカメラの連携について、より具体的な”活用例”や”連携方法”を解説します。
ユニバーサルロボット社の製品ネットワーク「UR+」対応の3Dカメラであれば非常に簡単に連携できるので、ロボットビジョンの活用に興味がある方はぜひご覧ください。
ユニバーサルロボットと3Dカメラの連携ガイド(UR+対応製品で簡単に接続)
2023.08.04 |
ロボットと3Dカメラを連携させることで、ロボットができることの幅が格段に広がります。
1. ユニバーサルロボット社のUR+とは
「UR+(ユーアープラス)」は、ユニバーサルロボット社が提供する製品ネットワークで、ユニバーサルロボット社のロボット(以下、ユニバーサルロボット)と簡単に接続可能なサードパーティ製の製品やソフトウェアの集合体です。
UR+に対応する製品には、ビジョンシステム、グリッパー、ソフトウェアをはじめ様々なものがあります。
UR+認証製品はすべて、ユニバーサルロボットとの間で接続が確認されており、ユーザーは、UR+認証製品を選択することで、安心且つ簡単にユニバーサルロボットのシステムを拡張することができます。
例えば、Roboception社の3Dカメラ“rc_visard”とそのソフトウェアは、UR+の認証を受けているので、簡単にユニバーサルロボットに接続し、ロボットに3次元の空間情報を送信し、物体の位置、方向などを正確に把握させることができます。
本記事では、ユニバーサルロボットとRoboception社の3Dカメラの統合を例に、統合の価値や、如何に容易に実現できるのかを詳しく紹介していきます。
2. ユニバーサルロボット×3Dカメラ連携の価値
ユニバーサルロボットと3Dカメラの連携は、ロボットが周囲の状況を正確に把握してより複雑な作業を可能にします。
そして、これによりルールベースの動作や2Dカメラとの連携だけでは自動化が困難だった現場での、省人化や生産率のアップが実現できます。
より具体的な例が、ばら積みピッキングです。
ばら積みピッキングは、ピッキング対象が不規則に置かれた状態でのピッキングで、その場の状況に応じた判断が求められます。
ここでロボットに3Dカメラを連携することで、3D空間情報から物体の「形状」、「位置」、「向き」を正確に把握することができ、「ピッキング対象のワークの向きによって、アームの挿入角度を変える」、「箱の壁や障害物となる他のモノとの重なりをケアする」などの処理が行えます。
関連記事
より詳しくロボットと3Dカメラの連携について解説

3. ユニバーサルロボットと簡単に連携できる3Dカメラ
一般的には大変なロボットと3Dカメラの連携
ユニバーサルロボットと3Dカメラの連携は、状況に応じたより自由な動作へとロボットの可能性を格段に広げる技術ですが、一方で、ハードウェア・ソフトウェア共に高い技術が求められます。
これは、一般的に、ロボットと3Dカメラの連携には以下のようなことが必要なためです。
- 3Dカメラとロボットの関係に関する設定・調整が必要
- 3Dカメラから得られる複雑且つ大量のデータのリアルタイム処理が必要
- 3Dカメラの情報をロボットが理解できる形式への変換が必要
- 3Dカメラからの受けた情報から、ロボットの適切な動作が必要
よって、通常これらを実現するには、物体認識プログラム、ロボットプログラムだけでなく、その間のデータの受け渡しなどの知識も求められます。
そこで、おすすめするのがユニバーサルロボットのUR+に対応したRoboception社の3Dカメラ“rc_visard”です。
Roboception社の3Dカメラ“rc_visard”とは
“rc_visard”はばら積みピッキング対応ロボットビジョンシステムで、取得した3D空間データを解析して把持点を取得することや、ロボットの衝突回避のケアができる3Dカメラです。
Item PickやBox Pickなど、目的に応じたピッキングをプログラムなしで実現するためのモジュールも合わせて提供しています。

UR+によるロボットとRoboception社の3Dカメラの連携
Roboception社の”rc_visard”は、ユニバーサルロボットが提供するロボット制御ソフトウェア”PolyScope"に統合されるJavaベースのプラグイン”URCaps”上から認識することが可能です。
そして、さらにRoboception社のモジュールである、“Item Pick”、”Box Pick”、”CAD Match”などもプラグインとしてURCaps上で使用することができます。
これにより、ユーザーが特に複雑なプログラムを開発することなく、URCap上の設定のみで、簡単に3Dカメラの情報をロボットシステムが認識できる形式でインターフェースし、それを元にロボットを制御することが可能となります。
URCapsの詳細に関してはこちら
4. ユニバーサルロボットと3Dカメラ"rc_visard"の連携方法
URCap上で3Dカメラ”rc_visard”を認識させて、ロボットを制御するための手順は、たったの5ステップです。
以下に、実際のステップを簡単に紹介します。
ステップ1ソフトウェアインストール
①ユニーバーサルロボットのURCapをインストール
②Roboception社のURCapプラグイン”rc_visard_urcap”をインストール
ステップ2ロボットとカメラを接続(URCapにrc_visardの情報を設定)
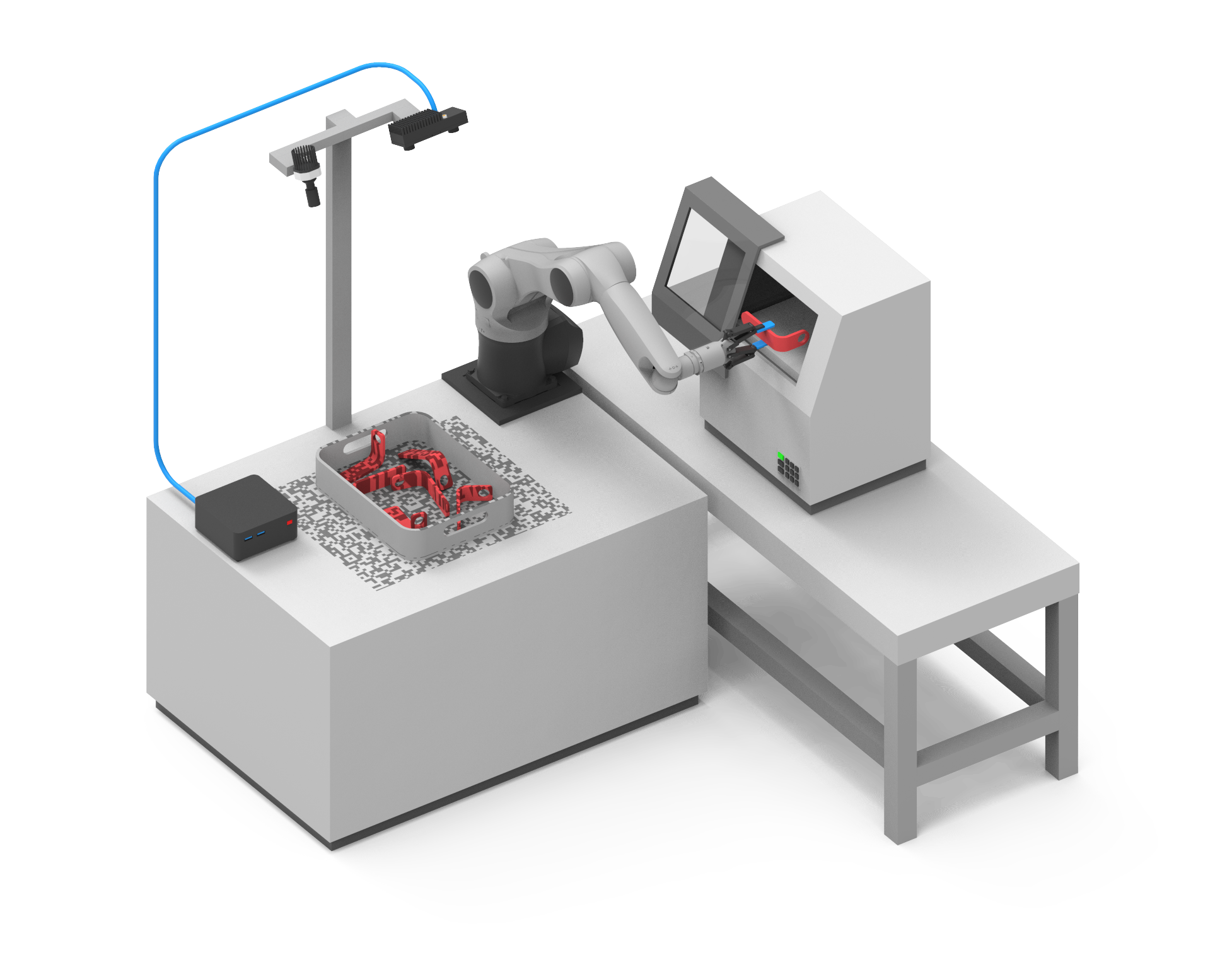
①3Dカメラ”rc_visard”をユニバーサルロボットのコントローラーのethernetポートに接続
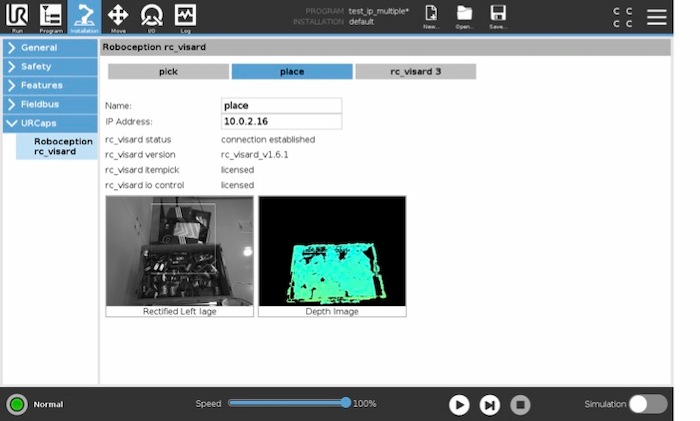
②rc_visardのIPアドレス、名称をURCapに設定
ユニバーサルロボットに”rc_visard”を接続すると、ステータス情報、左のカメラの映像、3D深度イメージがURCap上に表示されます。
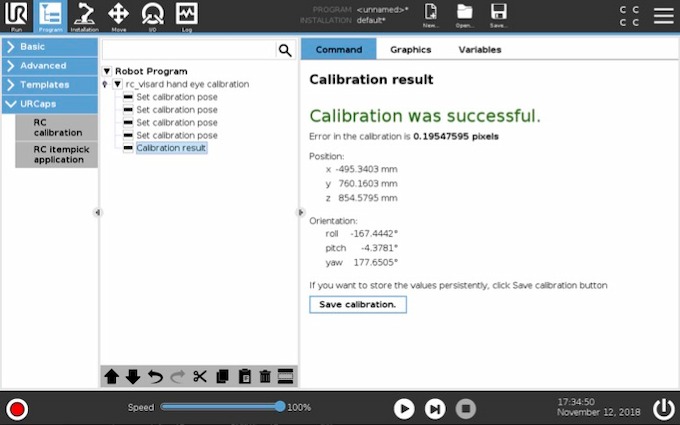
ステップ3URCapを使用して”rc_visard”をキャリブレーション
①ロボットアームにキャリブレーション用のプレートを接続
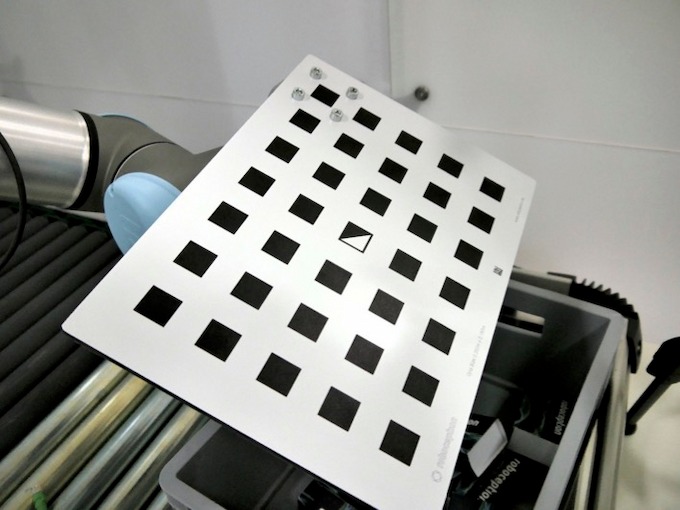
②URCapに用意されているキャリブレーションプログラムを実行
ロボットがプログラムに従って動作します。それをカメラで確認することでロボットアームとカメラの位置関係を自動的に認識します。
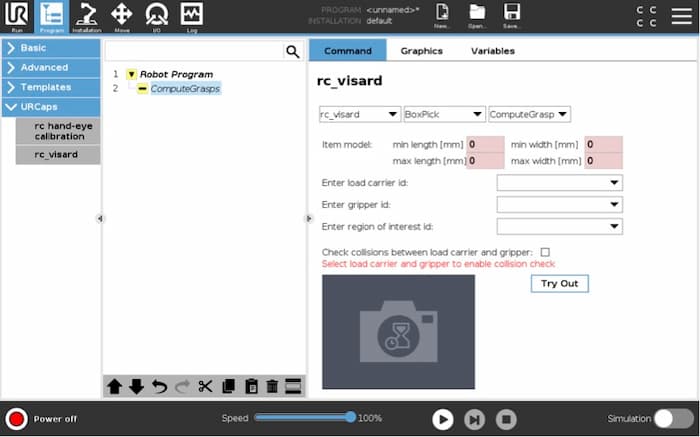
ステップ4使用するモジュールを選択と設定
①ItemPick, BoxPick, CADMatch, SilhouetteMatchからモジュールを選択
URCap上で動作するRoboceptionの用途別モジュールが、箱型形状、球体、薄い形状、複雑な形状のものを的確に検出します。
立方体のワークに
BoxPick
段ボールや梱包箱など
立方体の対象の
位置・姿勢・サイズを検出。
球体、多面体に
ItemPick
吸引式グリッパーに最適。
ワークの最もフラットなポイントを算出。

より複雑な形状に
CADMatch
CADデータを元に対象の位置を検出。信頼性の高い把持ポイントを算出。
フラットなワークに
SilhouetteMatch
薄い(高さのない)
対象物を検出。
均一な質感でも検出可能。
②モジュールの必要項目を設定
設定する項目は、選択するモジュールや検出対象によって異なります。
例えば、BoxPickを選択した場合には、検出対象のBOXの最大および最小の長さ、幅を指定するだけです。
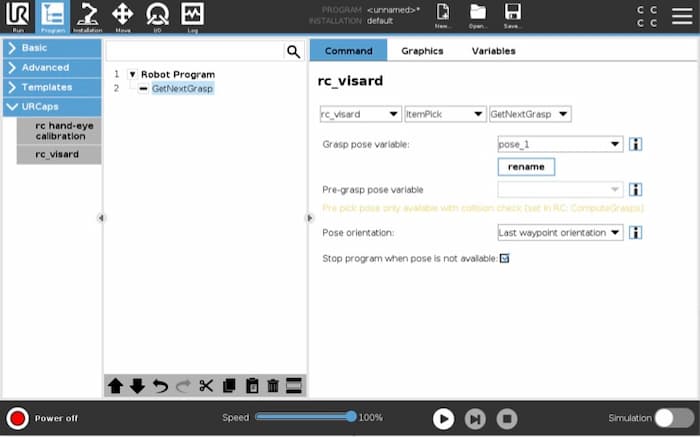
③モジュールから取得する項目を設定
モジュール毎に出力できる項目が異なります。
例えば、BoxPickの場合に、「GetNextGrasp」を選択すると”把持点”を"Polyscope”が直接読めるフォーマットで出力できるほか、座標やBOXのサイズなどもあわせて出力することが可能です。
ステップ5ロボットアームの動作の設定
PolyScopeのロボット制御機能によって、特にプログラムを使用しなくても”AutoMove”などで、ロボットアームを作業空間の特定の位置に動かすことなどが可能です。
ロボットアームの設定の詳細に関しては、Universal Robot社のPolyScopeのマニュアルをご参考ください。
ユニバーサルロボットと3Dカメラの連携に関しての詳細資料をご提供!
ユニバーサルロボットと3Dカメラの連携に関してより詳しい資料をご提供します。
各モジュール(ItemPick, BoxPick, CADMatch, SilhouetteMatch)のプラグインに関しても詳しく説明しているので、用途別に何を設定して、何ができるかがわかります。
5. ユニバーサルロボットと3Dカメラの連携のまとめ
ユニバーサルロボットと3Dカメラの連携は、ばら積みピッキングなどロボットの可能性を広げる新しいアプローチです。
ユニバーサルロボット社の製品ネットワークである「UR+」は、サードパーティ製の拡張製品やそのソフトウェアを簡単に連携できるため、UR+対応の3Dカメラを使用すれば、ロボットに周囲の状況を正確に把握させることが可能になります。
本記事では、UR+に対応したRoboception社の3Dカメラ"rc_visard"をご紹介しました。
ユニバーサルロボットとRoboception社の3Dカメラ"rc_visard"は、簡単に連携ができ、プログラム不要で対象の把持点座標などをロボットに認識させることが可能です。ルールベースや通常のカメラとの連携では実現できないピッキングにお悩みでしたら、是非ご検討ください。

3Dロボットビジョン RC_VISARD
Roboceptionの3Dカメラシステムは、カメラで取り込んだデータから、オンボードで対象の「位置・姿勢・サイズ」を検出。外部ハードウェア、プログラミングは不要。 また導入プロセスもシンプルです。
製品詳細
注目の記事

機械学習/ディープラーニングを活用したスペクトル解析

「プラスチックの選別」に革新!
近赤外分光がプラスチックのリサイクルに貢献
ハイパースペクトルカメラ導入の費用対効果は?
【第1回】光学機器商社がレタスで実験してみた!
種まき編