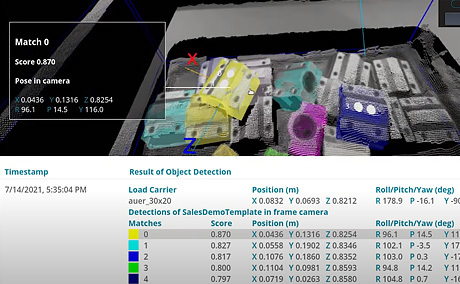
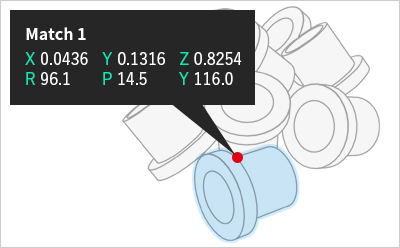
傾き情報を含む
把持点を自動検出
個々の対象を認識し、その把持点の座標(XYZ, RPY)を検出できます。
03-3258-1238
お問い合わせ


個々の対象を認識し、その把持点の座標(XYZ, RPY)を検出できます。
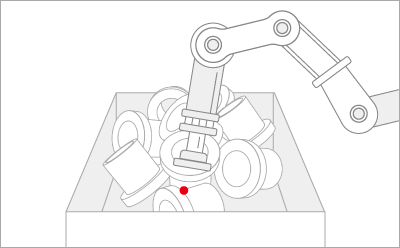
「箱」や「他の対象物」と衝突しないように計算。
ロボットハンドが「問題なく取りに行ける座標」だけを返します。
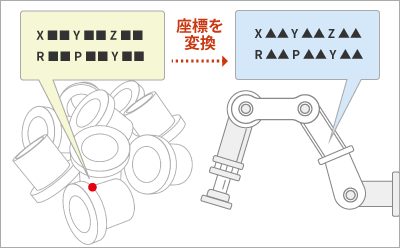
ロボットへの座標系の変換も自動で行います。
工数を抑えて導入できます。
動画では、ソフトウェアの画面を見ながら
「把持点の自動検出」「衝突回避シミュレーション」の様子をご確認いただけます。
箱型や球体、複雑な部品・製品、
フラットな質感の物でも対応可能
用途に適したアプリケーションモジュールが
揃っています
段ボールや梱包箱など
四角形の対象の
位置・姿勢・サイズを検出。
吸引式グリッパーに最適。
ワークの最もフラットなポイントを算出。

CADデータを元に対象の位置を検出。信頼性の高い把持ポイントも算出。
薄い(高さのない)
対象物を検出。
均一な質感でも検出可能。
特別な学習・複雑な操作は不要
直感的に使えるソフトウェアで
簡単にプロセスに統合可能
対象物や箱のサイズ・形などを入力。基本的には、わかりやすいUIに従って入力を進めると設定が済みます。

キャリブレーション機能で、カメラの座標とロボットの座標の合わせこみが可能です。
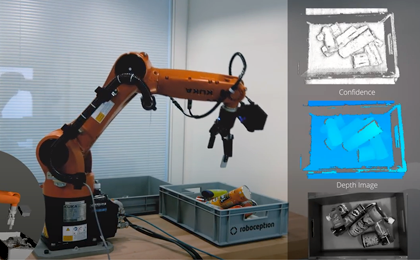

3Dデータ撮影から画像解析までを含むソリューション。
プログラミング不要で、導入工数も少ないため、価格を抑えて導入できます。
より詳しく知りたい方は
カタログでご確認ください
デモ機の貸し出し、お困りごとなど
お気軽にご相談ください